This weekend, I’ll be taking Silent X to NHRL for their March event. You might be wondering, why just Silent X? Well, the registration system was overhauled for the 2024 season which transformed it from a first-come, first-serve system to a lottery system. While my main intention was the use up the Saiko! spares, only Silent X got in. Oh well… but let’s get to the good part.
2024 brought a few other changes including the ruleset. For example, the weight bonuses were adjusted such that novel locomotion robots essentially received a 50% bonus vs the non-uniform weighing in the past years. This meant that current Silent Spring was no longer legal for 2024 as it finally weighed almost 5 lbs at the November championship event. If it were to compete again, I would finally have to take weight optimization seriously instead of making everything needlessly stout and adding ballast everywhere.
So we return to SX, which was registered for March initially for humor (it was going to fight using a rubber drum) but now has deliberate purpose. During the lunar new year, I threw together slight changes to the wheeled X that were of interest for future SS.
- Hubmotor weapon system
- 6s power system
- AM32 weapon esc
- Lynx-robot switch
- Radiomaster receivers
- Repeat Robotics Dual esc
The hubmotor will hopefully reduce the total weight of the weapon system by having fewer components. At minimum, it will free up internal volume and allow for a non-disk blade shape. The 6s voltage system should be more efficient in addition to being generally more compatible with the low kv outrunners. Finally AM32 firmware has been all the craze lately for its low-speed tracking and spicy starts. Seems like the perfect pairing for a torquey hubmotor.
People may remember, this isnt my first hubmotor by a longshot. In fact, the original SS hubmotor (~2017) was actually pretty good mechanically but would be underpowered by today’s standards. And remembering that SS will be 4.5 lbs, significant overhead will be needed in order to self-flip from any orientation. So we’ll start as that as a baseline and make it bigger, haha. For reference, the old motor was based around an RC Timer 4215-650kv (35 x 7 mm stator size). Also check out Aaron’s robot pages for more good hubmotor reference material.


My typical go-to is harvesting from existing motors. I’ll have some idea of what its performance would be and I won’t have to rewind stators (oh god not again). Here are a few candidates: BadAss 3515, SunnySky 4014, SunnySky 3515XS. Although the BadAss claimed better power and had wider range of kv available, I ultimately decided on the 3515XS because the smaller can diameter. The reason being I need enough aluminum meat between the can OD and ring bearing ID. The 4014 motor was fantastic as well but would have required advancing to the next bearing size up which was undesirable. Still, the XS motor has double the stator length over 4x the power of the old system including voltage considerations.

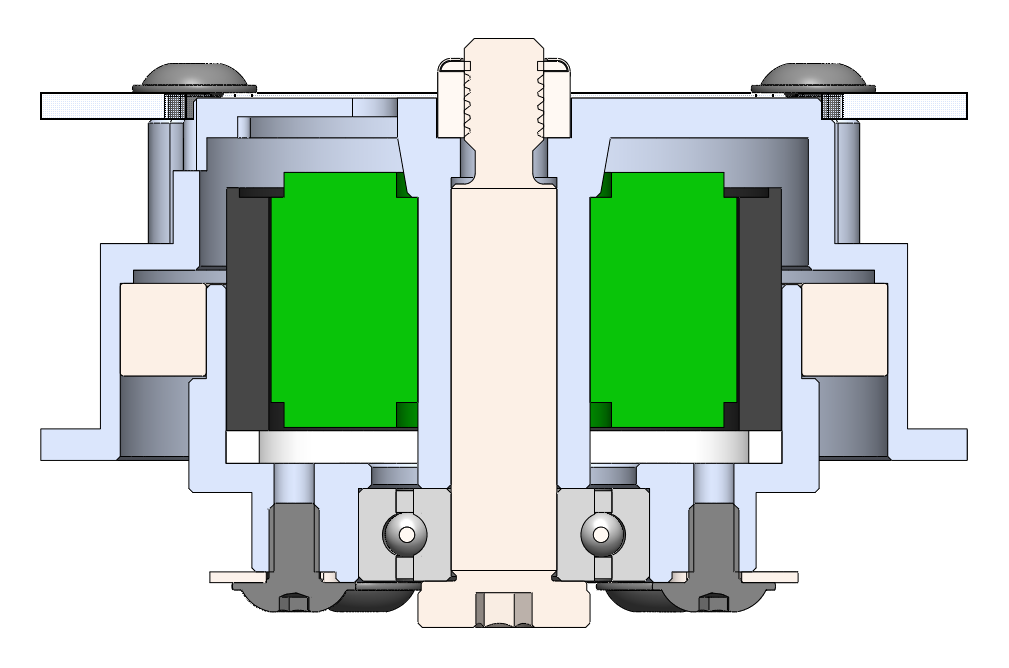
This is the old hubmotor setup. It consists of two custom parts and a few COTS or MOTS parts. The custom parts are the base (where the stator is mounted) and rotor (where the blade is attached). The stator and flux ring are pressed into their respective housings with the assistance of the green sauce. A shoulder bolt binds the assembly together and the direction of bearing counter bores keep the assembly from coming apart. This setup uses one thin-section bearing around the can; this is still a requirement I’ll be maintaining the same overall arrangement.

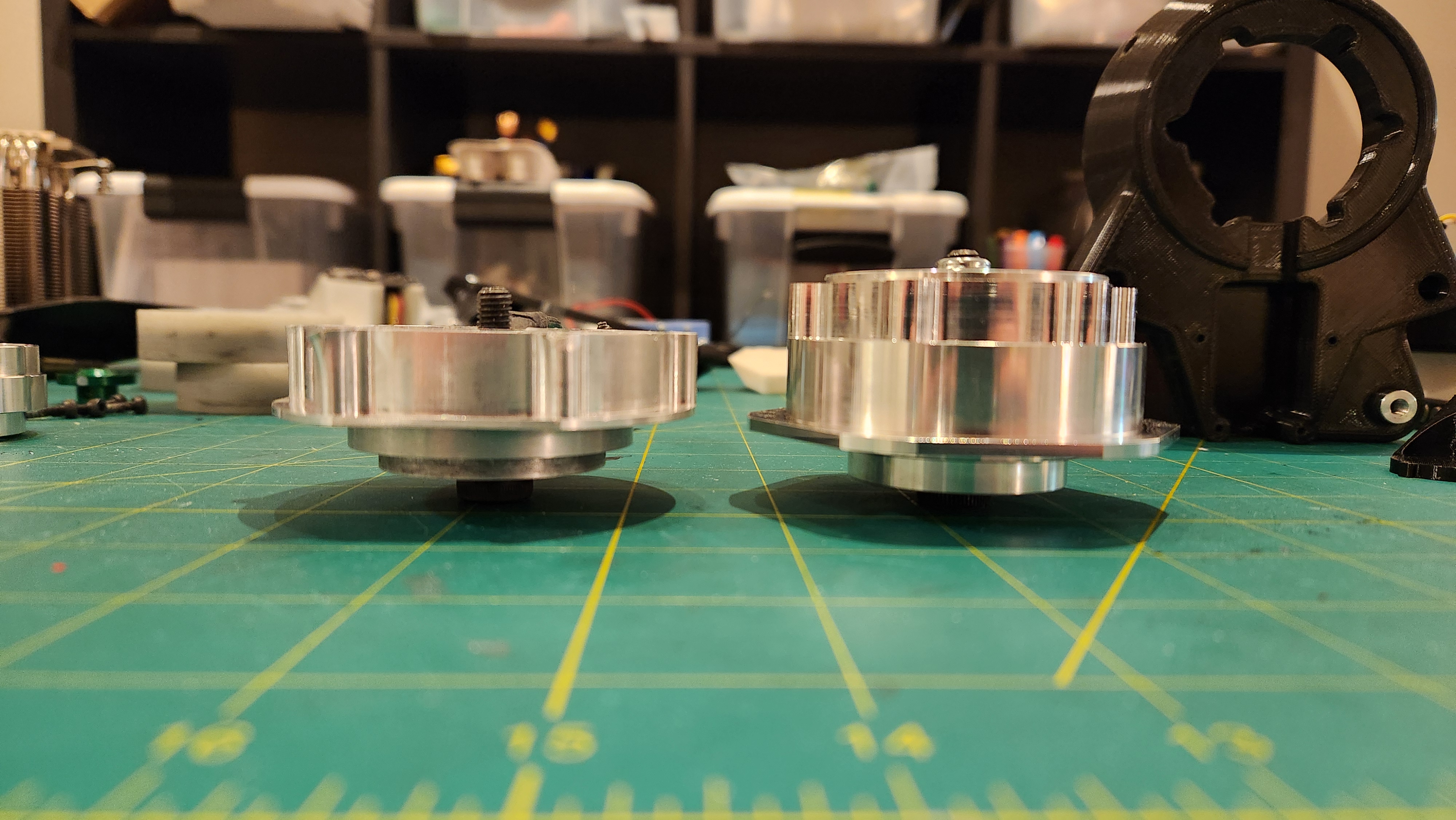
This new motor would carry on the same basic recipe with a few exceptions. I upgraded all the M3 hardware to M4 (M3 hardware was barely passable lately), counterbored the nut into the base part, and shifted the clamp bolt pattern inwards to reduce radial footprint because I want to maintain that aesthetic tapered sweep around the module. A more recent addition, I added the pulltruded carbon rods in the chassis for extra stiffeners.

Because I only had maybe 3 weeks before the event, I had to design and order everything very quickly. I took some risk on finding height and actual can diameter, ordering the hubmotor parts in advance of having the motor physically in hand. I made some reference measurements from similar motors and added margin on overall height. This could be optimized in the future.







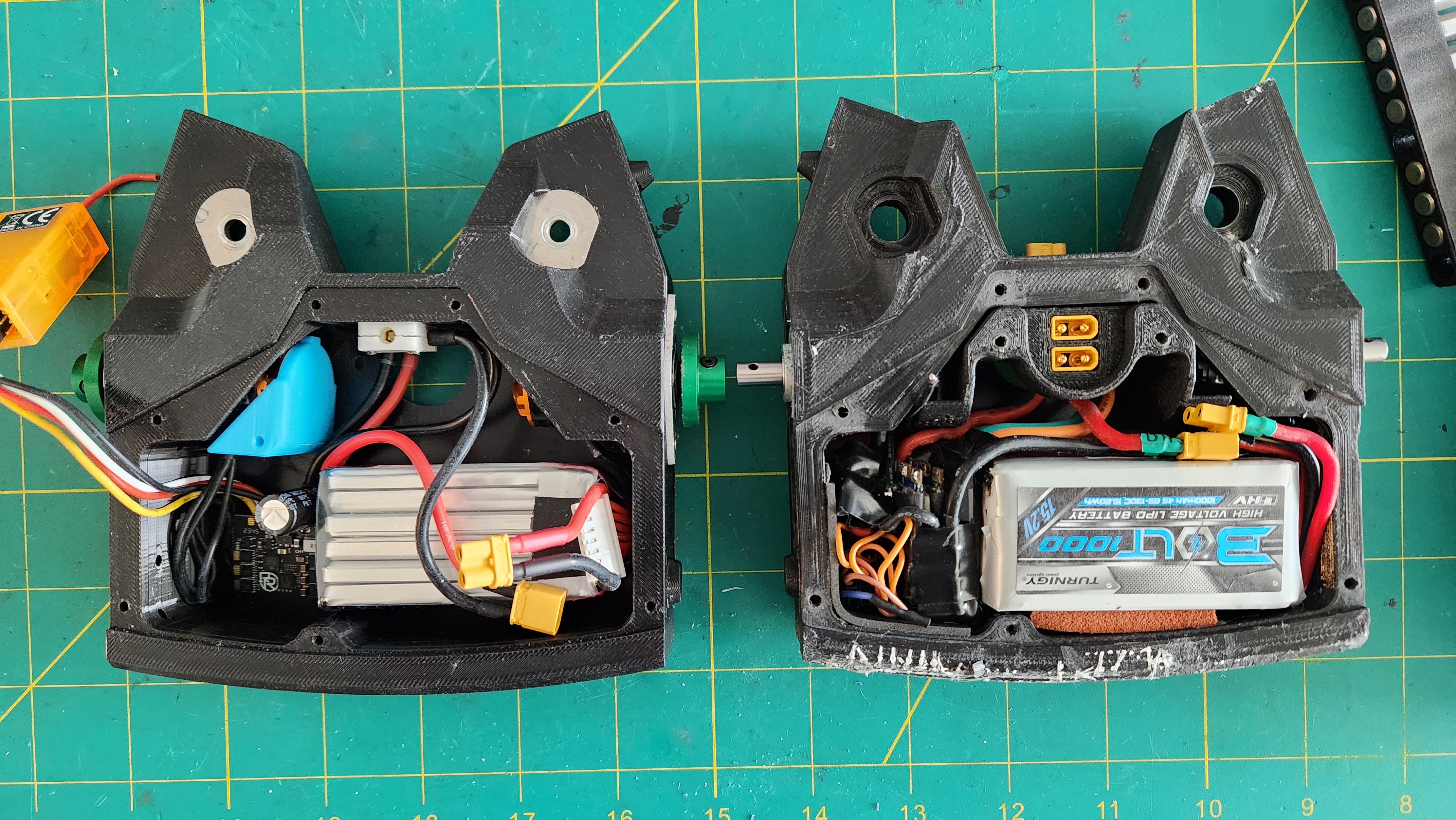
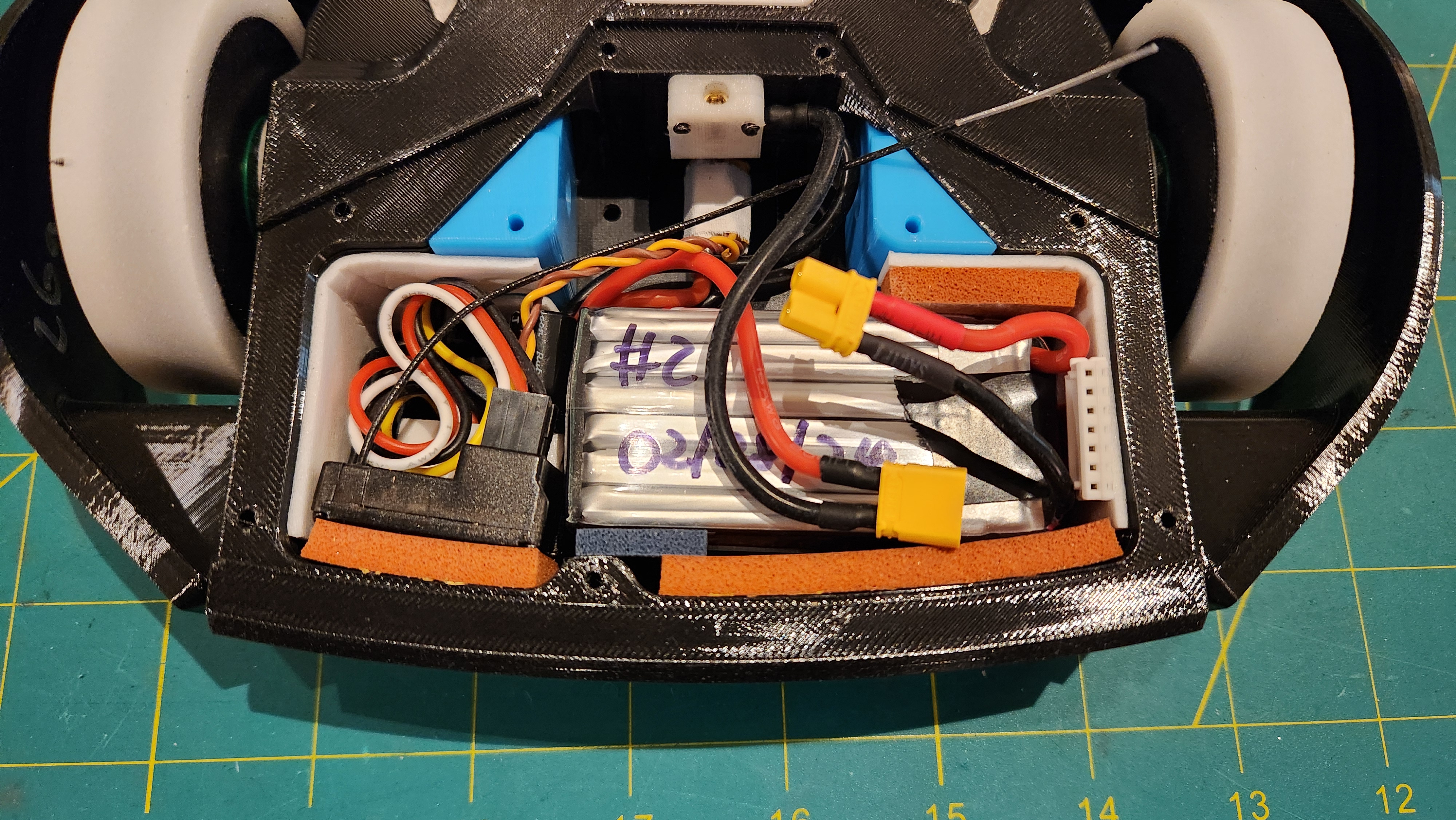
At nearly 0.7 lbs, this motor was NOT light. But luckily the rest of the robot supported this goal. Using the existing chassis footprint (because I am lazy), the largest 6s battery I could fit was 550 mah which is small when you compare the watt-hours of the previous battery (4s, 1000mah) but luckily lighter weight. The lynx switch also saved weight and space by replacing the dual link setup I previously had for accomplishing precharge. In terms of space and weight, the repeat esc was maybe 1:1 with my old beetle setup but it did simplify wiring a lot and it supports the 6s voltage.
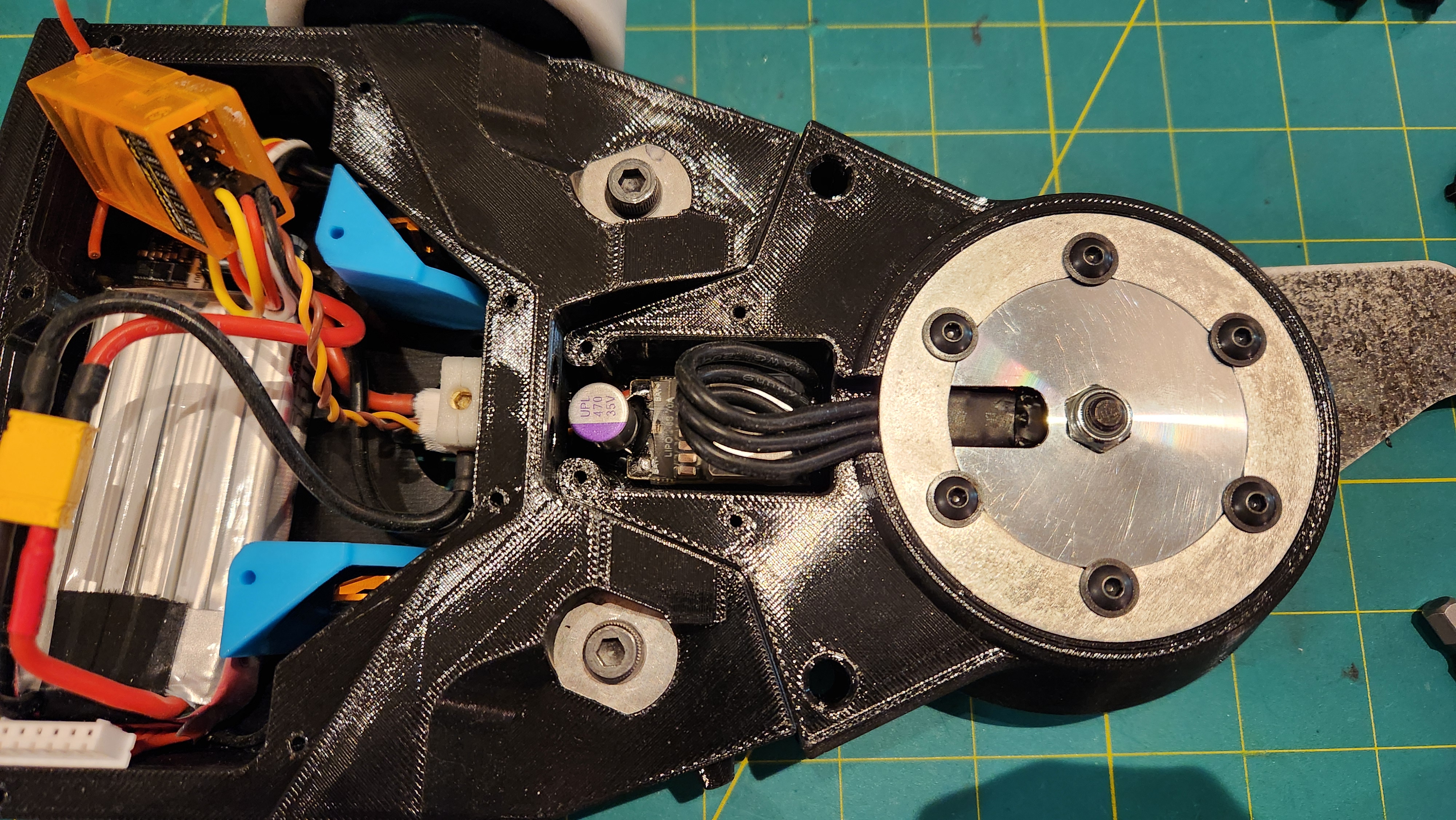
Also now with the receiver installed. I bought R84, R85, and R86 receivers to play with and ended up deciding on the R85 due to stockier form factor. I was pretty unimpressed by the FrSky protocol. Trying to figure out which settings to use with my multi-module, I learned about all sorts of community issues with errant signals no matter D8 or D16. I even discovered that if the robot is too close to the transmitter, I simply lose connection! What is the deal with that? Somebody please advise. I never experienced this with my spektrum receivers; this whole experience honestly made me want to swap back.
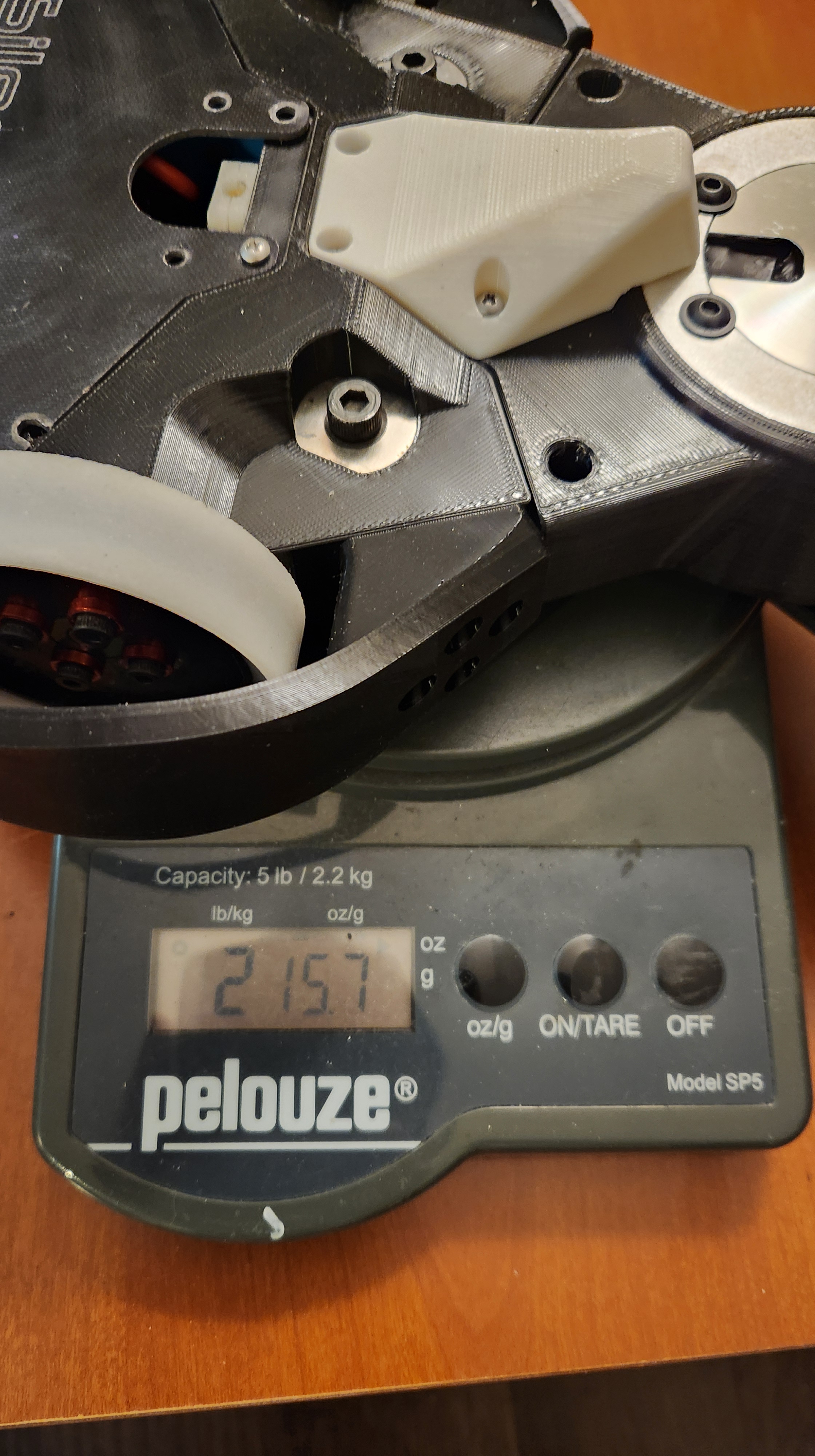
SX was on the nose for weight! 3 lbs exactly!

SX won’t have any modules or alternate armor but that’s okay. It is an experiment and as long as it gets some fights in, there can be data and hopefully a result! See you in Norwalk!
See the preliminary rounds streamed live here and if I make it long enough or accept grudge matches, you can watch prime time here!
