*Note: this post is a backlog and spans the events in 2024 prior to finals*
NHRL instituted a rule change for the 2024 season, decreasing the weight bonus for non-traditional locomotion (NTL) robots from 2 lbs to 1.5 lbs (total 4.5 lbs) in the 3lb nominal weight class. This included the shuffler modules I built for Silent Spring. So I had to cut 0.5 lbs from the robot which in-short motivated a full design revision.
New year, new resolutions
To make these weight goals happen I scoped out two main projects:
- Hubmotor weapon
- Ultra-light shuffler drives
The hubmotor I have already been vetting out on Silent X earlier in the year and felt confident in its performance; only a few durability upgrades would be added for its adaptation in its 1.5 lb heavier counterpart. In particular:
- The top locknut was replaced with a tapped hole and material nub
- the top bulkhead was thickened to 5mm
- the blade bore was increased to 55 mm
The general idea was reducing the thin sections along the load path. X’s failure vs Impakt was due to the pocket which housed the locknut. The larger blade bore was to improve the MOI/weight characteristics of the blade, since it would require less steel at closer radii.


The shuffler drives had a few more directions I could pursue so I started getting some shapes in SolidWorks and seeing which changes made the most sense. Some oddities from the original adaptation included asymmetrical ground clearance and drive speed in the nominal vs inverted positions; these could be fixed at this update by changing the position of the cams and pins relative to the robot height.


I dropped the effective wheel diameter to 2.25″ and thickened the main chassis a bit to accommodate a large capacity 6s battery to better compliment the lower kv hubmotor. I also converted Silent Spring to ELRS based on X’s success. I have been a huge fan of the Radiomaster ER3Ci and ER5Ci receivers for their small size and integrated antennae; SS would be getting the former.
I have never made a post about the origination and design process for the shuffler modules. Seeing as how there are many references of other work and public changes in the rulesets, its time to show my hand… but not just yet. Expect a dedicated post to celebrate Silent Spring’s retirement.


One risky change to make the robot more “micro” was using custom, smaller motors. I was always under the opinion the 1806 motors were more power than required for the 3lb class, even at a 5lb robot. It also annoyed me that the motor diameter was larger than the ring gears on the 22mm gearboxes I used. I found some 6s-rated 1606 motors from BetaFPV at an awesome price and cored them out for a custom face mount which matched the gearbox face plates. This solution was also much shorter than the old 1806 stack.
One issue I recognized immediately is the shaft integration to the motor bell was done via spline. I knew this would give me a lot of problems compared to motors I’ve modified previously because a press fit would be insufficient. After exploring a few solutions, I settled on using these 18-8 stainless knurled pins as shafts. They were a bit too short and the mismatched spline granularity made for a slight eccentricity so I was not optimistic.
Foreshadowing: unfortunately, my intuition holds true.



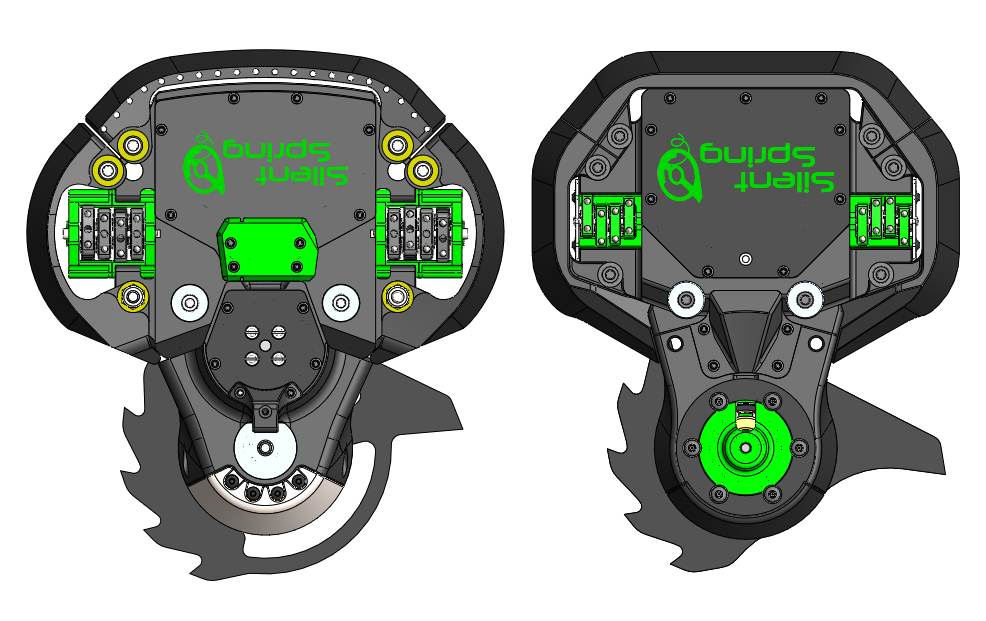
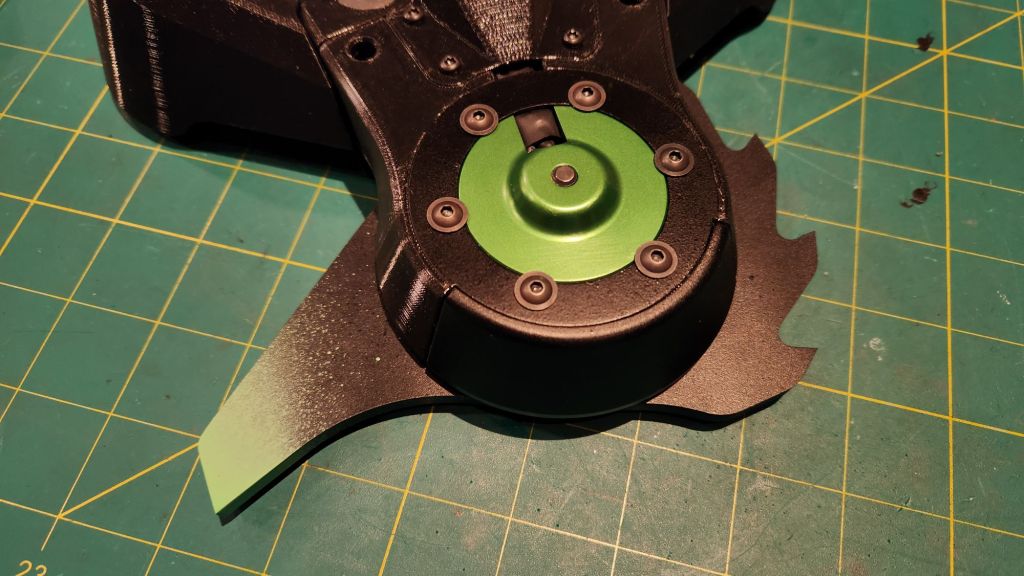
The steel nose returns but the hubmotor made the mounting more challenging. Instead of the bolt flange on top, I devised a method to conceal the mounting with pins captured in the print. That way I could maintain a TPU layer between the motor housing and the armor. The downside, is destructive methods are required to remove the nose.


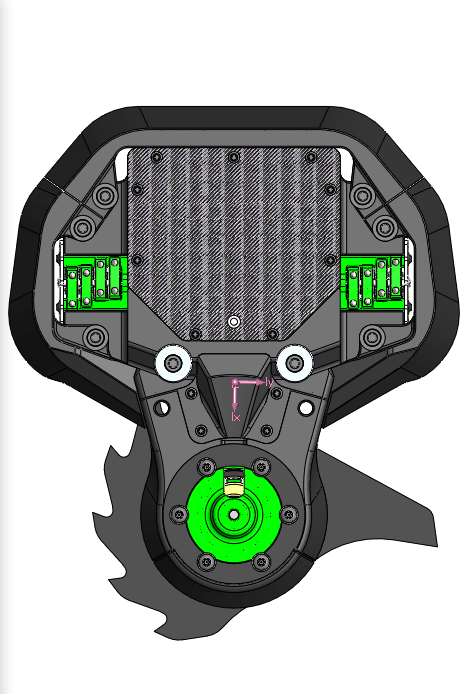
The blade is still mounted using the clamp flange method but I upsized the screws to M4 and reduced their quantity to 8. Speaking of which, I decided to invest in S7 tool steel blades to deal with all the AR blades and armor we see these days. This new design has an aggressive bite and no cutouts for maximum durability. Of course I had to give it a sweet paint job.
In the final week before NHRL, I ran into some issues with my Neutron 70A ESCs running AM32. The weapon was stuttering on startup and could not accelerate past a certain speed instantaneously. I spent a few evenings debugging and testing but eventually had to stop and finish MegatRON 5 which was also debuting in September. I decided to pack one of the old Succex 80A BLHeli32 ESCs with me just in case.
Summary: NHRL Sept. 2024

With such a good looking robot, I was feeling confident; those emotions would take a sudden turn in its first match vs the rookie bot Xanadu. It quickly became clear that the robot had numerous issues that were not apparent in what limited testing I was able to perform.
- Weight distribution was too far forward: the rear of the robot would bounce while driving and I was losing a significant amount of translation from lack of grip. This is a symptom of poor CG as a proper CG would place more weight over the shufflers for more efficient use of the walking kinematics.
- Unreliable drives: partway through the match one of the microshufflers stopped responding because the pinion slipped from the motor shaft. With one bouncy shuffler left, I was lear counted out many times and was forced to rapidly pulse the weapon to escape from tricky spots and translate.
- AM32 woes: it is known by now that the AM32 firmware has issues with certain processors like the G071 in the Neutron 70A ESC and these issues manifest themselves in various ways. For my case, the weapon performance became anemic partway through as if my signal range was truncated and I only had ~20% of my throttle usable.
To nobody’s surprise, I lost that match. No offense to Xanadu, but a robot with a reputation like Silent Spring’s comes with an expectation it would win. The builder, Nick, was rightfully happy and relieved but I was feeling this new version was already a let down.
Afterwards, I replaced the weapon ESC with the Succex and reapplied the pinion gear. Thanks to team Pandamonium (specifically Kevin and Alex) for lending a soldering iron and retaining compound. What followed was an unusual streak of luck and chaos as a minimally mobile SS threw enough random haymakers to advance deep into the bracket. Brettzone links below:
- Xanadu ( L )
- Bloody Mary ( W )
- IceBlade ( W )
- InT0lerance ( W )
- Sea Dragon’s Roar ( W )
- Liberation ( W )
- Prince ( W )
- Mako ( L )
… untill it ingested a wheel guard from Mako’s minibot which high-centered the bot. Ugh. That is an annoying way to lose. But all things considered, I am thankful Silent Spring was able to make it to top 4! After the first loss, my hopes for qualifying were depleted. But by luck, raw power, and some driving style adjustments it was given a second chance; time to improve and show its true potential at the NHRL World Championships in December!
More changes
The huge issues with the bot in Sept revolved around the drive. Drive reliability is the obvious one but the more obscure issue was weight distribution. The new hubmotor setup put more weight forward which made the backend bouncy instead of gripping the floor.
I last minute registered Silent Spring for the Boxellmania event as an opportunity to test out some ideas for solving the issues before NHRL finals. As a result, I needed to have these ideas ready in about two weeks. I fixed the pinion slip quickly by adding retaining compound but weight distribution would require some new parts. I sought to solve this by:
- Using a lighter blade
- Adding rear ballast
Luckily I designed the hubmotor rotors to be backwards compatible with X so I slapped on the double ended bar which saved roughly 0.3 lbs. I spent 0.2 of that weight adding 1/4″ steel dowel pins in the rear armor of the bot. They double as defense against horizontal spinners as a plus.

Between the addition of the pin ballast and the lighter blade design, the CoM shifted backwards ~0.5″ and the difference in handling was clear.

Summary: Boxellmania Sept. 2024
With SS entered in the main competition, the goal was now to get as many fights in and stress test the components.
SS had a fair mix of opponents; one tanky lifter, one vertical beater, and two hammer saws. These opponents would definitely require a competent drivetrain and was a good test if the ass-mass was functional.
Initial results were great! SS definitely had to stretch its legs fighting Under Destruction and Boink!. Both opponents were fast control bots and in the latter case had a devastating counter attack. Boink! actually hit the hubmotor and penetrated through the casing but luckily missed all the winds.

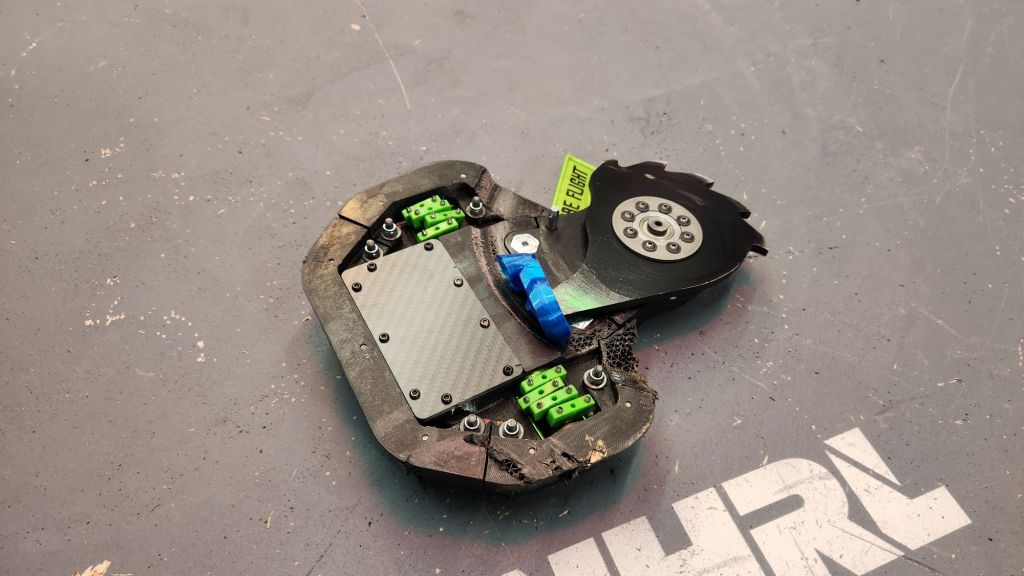
Silent Spring’s final opponent of the day would be The Wall pt2, a shuffling hammer saw with a massive sparse TPU front. I ran inverted to demotivate their blade with my own as an overhead guard. That strategy was working until my blade became entangled in their front and they landed a critical blow straight through the 3mm CF bottom panel and hit the battery. Even though I was the only bot on fire, both bot had to go into the sand bucket because of the entanglement.


Well… it looks like I will be rebuilding the bot. To make things worse, they accidentally sprayed the bots with a powder extinguisher which was awful to clean and ruined the open bearings. Aside from the obvious mechanical and battery losses, I also lost a receiver and one drive esc.
Changes for finals?
Silent Spring’s Boxellmania performance renewed my faith in the design changes from version 8. Changes for the NHRL finals would be refinements to the findings I had tested there.
- Lighter Blade(s) – the set of usable blade designs would need to support the weighted rear armor
- Reinforced hubmotor casing – modified geometry to increase the thickness in specific areas to further guard from overhead attacks.
- Increase drive motor reliability – drive pinions continue to be an issue
Stay tuned for the next post on championship prep and competition!
