Since the 2023 loss to Emulsifier, I have had ambitious goals set for MegatRON which revolved around the idea of increased control/maneuverability and delivering deadly impacts at anytime in the arena.
Testing in preparation for these changes were partially displayed in April where I applied a hubmotor weapon and treads to the MegatRON 4 design. The next phase would be gyro cancellation via flywheel and this change required a brand new MegatRON.
Whywheel
Hammer saw robots face gyroscopic precession in an especially challenging way. Yes, vertical spinners (drums, disks, etc.) also deal with precession but because they are rotating upwards, the side that lifts is actually advantageous for stability; it is like they are drifting into turns. For hammer saws which spin down, the gyro experienced at high speeds lift the side inside of the turn and tend to flip the robot over. Bad for a style of robot whose strategy largely depends on control. For this reason, I run the weapon at a low cruising speed while driving and charge up the weapon for hits. The hope is by canceling the precession with a counter-gyro, the weapon can always be maintained at a deadly speed.
Designing a flywheel
To specify the required flywheel performance, I first needed to specify the gyro it would be counteracting. The key parameter that I needed to balance was angular momentum; to be perfectly cancelling, the gyro angular momentum needs to equal the weapon angular momentum. For this redesign, both the flywheel and weapon were candidates for change so I could tune parameters until I was happy with the performance and the design was feasible. Obviously I did not want to sacrifice combat potential so I used v4 MegatRON to benchmark target KE and angular momentum.

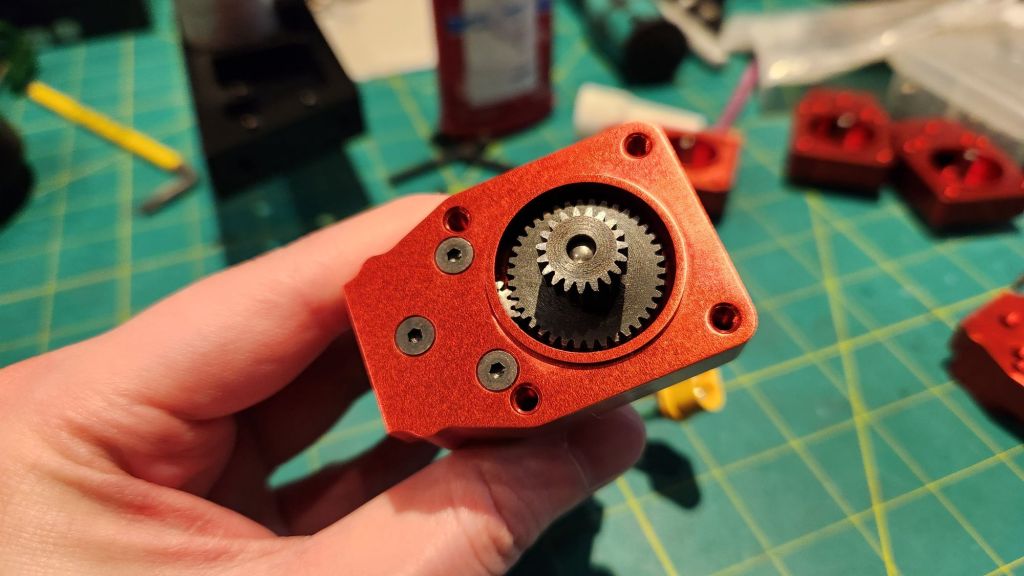
Since the transition to hubmotor weapon, I envisioned the flywheel would also be built as a hubmotor and be located in place of the old weapon motor. I picked a ring-shaped flywheel because that shape has the best MOI per mass. I made the outer ring from steel as a compromise between dense but economic material to efficiently generate moment. The stator keyed into a custom titanium shaft with integrated features that locked it between the main frame members. The flywheel rolled on hybrid ceramic bearings. In bench testing it took several minutes to spin down!



Unfortunately, the space was limiting the maximum cancelation I could achieve. Additional mass at inner radii had diminishing returns and I was already at the speed limits of bearing options without considering load conditions. I settled for partial cancelation of about 50% instead. I guessed I could maintain cruising speed at ~75% which is a huge improvement over the ~25% I had before.
Other upgrades
To make space and weight for the flywheel, other aspects of MegatRON were slimmed. The drive motors were transitioned to inrunners (TP2940s) with custom gearboxes in a similar style to SawBlaze; the bulk of the reduction was still a BaneBots P6 but an additional spur stage was added for an overall reduction of 22:1. The driving pulley was also reduced in diameter increasing the reduction relative to the v4.5 (April) system.


The output shaft was also custom. Instead of increased torque via longer output gears (P6H), I designed a custom arrangement to add more parallel gears. The 3:1 stage was a bit funky as the angular spacing for the tooth count is not equally spaced.
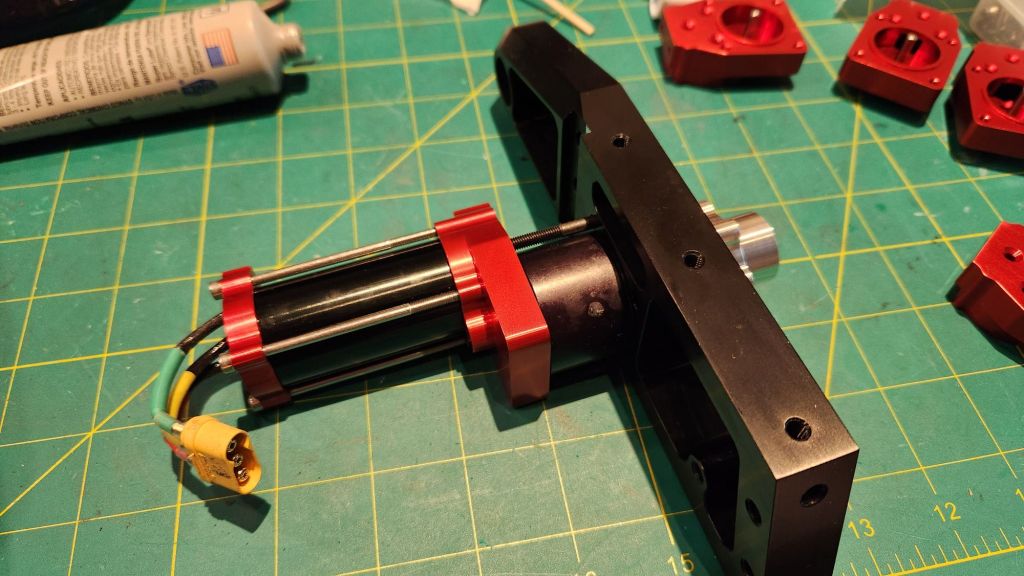

Why the spur stage vs another planetary stage? I could jog the output shaft forward a smidge and improve the tread patch location relative to the center of gravity.

Speaking of tread patch, I’ve fought Emulsifier enough to know that the treads can be a huge liability if they are removed. I designed a drive hub that can simultaneously mount a backup spur wheel to keep the bot drivable. I suspected as an added bonus it may enhance traction when MegatRON is carrying an opponent but I haven’t evaluated the compressibility of the treads yet.
In support of the upgraded weapon system and the inrunner drive, I increased the system voltage from 6s to 8s and decreased the total capacity to 2600mah. Cognizant of Saiko!’s issues earlier in the year, I preemptively upgraded the capacitors on the Rhino 80 ESCs and gave a healthy capacity 2X FOS on MegatRON’s batteries from runtime data.

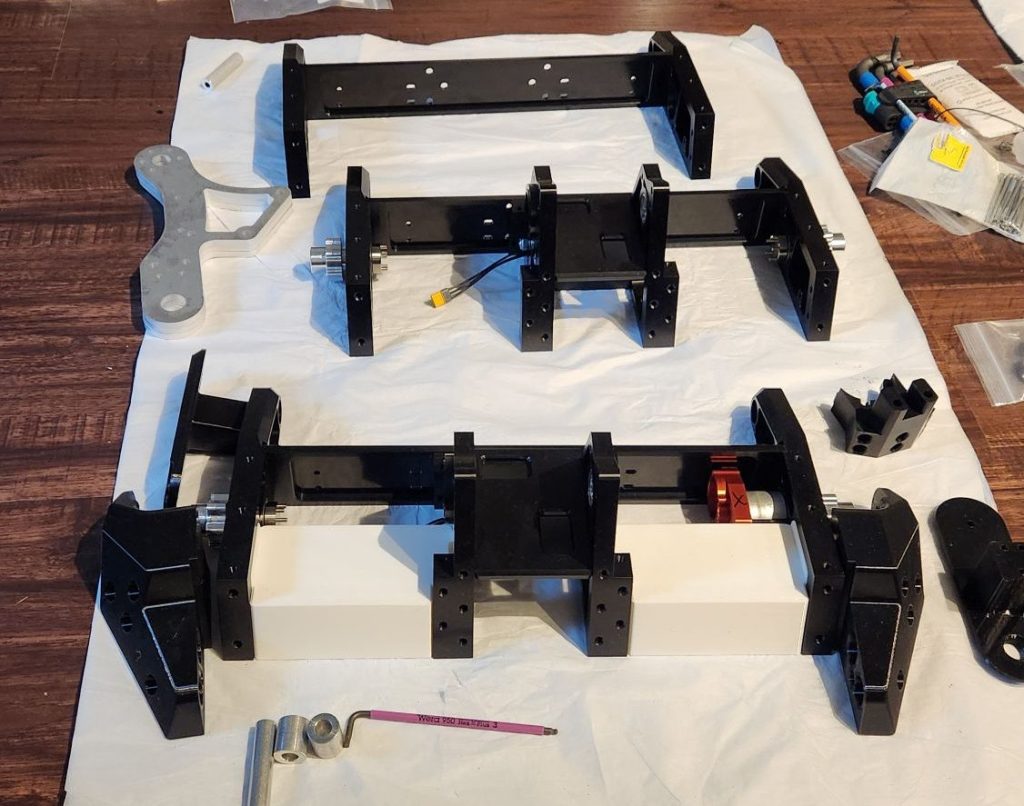
These changes allowed the frame to slim in height and many good things propagated from that. The front plow height is the heaviest singular part on MegatRON and is driven by the frame height; this could now be reduced as well.




There were a few setbacks that delayed the build plan for MegatRON 5 and resulted in many late nights in the final weeks. On the Thursday before the event, I decided to prepare v4.5 for primary use in the September NHRL event and save this new version for testing.
NHRL: Sept 2024
Bringing two versions of the same robot is far from ideal. Although many parts are compatible, most of the consumables are not. You end up overpacking or selectively packing; I chose the latter and had essentially no spares for MegatRON 5 as I was not expecting it to fight.
Arriving late Friday I was able to safety the robots (including Silent Spring 9) and give MegatRON 5 its first test drive. It was simply incredible, the best robot I have ever driven. I was so giddy with excitement I decided I would field it as the primary which meant I would have to be VERY selective with damage and strategic forfeits.
This decision was in spite of the ineffectual flywheel. In the same first test, I decided to take the flywheel up to full speed and then turn the robot in place. The expected result was gyroscopic precession but instead there was a small lift followed by an angry grinding noise and a puff of smoke from the tiny stator. Opening the bot in the pits, it was clear the flywheel wouldn’t spin anymore (somewhere between the wobble and ceramic balls falling out) but the assembly was embedded so deeply in the robot I elected to leave it in for the tournament.

Fights Summary
MegatRON fought 4 times and finished 2nd with a strategic forfeit to Yahoo in the finals. The main reason to forfeit was because MegatRON 5 did not have a damaging weapon and would take substantially more damage from Yahoo. I had accomplished my goals for the event (tested the new design and qualified for finals) and decided to leave personal glory on the table. Brettzone fights linked below:
- Hurricane (W, KO)
- Mr. Roper (W, JD)
- Kazaa Lite (W, KO)
- Hurricane (W, KO)
- Yahoo (L, FF)
This version’s biggest strengths are undoubtedly in the drivetrain. With its increased speed and lower CG, I was able to bully other 30lb robots around with ease and wall slams resulted in toppling opponents. All three of MegatRON’s KO wins were from trapping opponents against the wall in odd positions. The lengthier tread patch enhanced stability and control. The effect of the backup spurs is TBD and the teeth may need to be remade more pronounced.


The version’s biggest weakness (aside from the non-functional flywheel) is actually the weapon. After the first hit of the first fight, the ESC (Rhino 80) burst into flames and unbeknownst to me also torched a phase on my stator. This is likely a result of the increased system voltage as compared to April so I’ll need to design in additional overhead for the future.



I’ve watched that GIF more times than I want to admit. So satisfying!
Takeaways for NHRL Finals
Sadly, I was unable to evaluate the flywheel properly in Sept and while I do believe in it as a prospect, I weighed the blade reliability higher priority and thusly opted to remove the flywheel for increased beef. Larger stator size, bigger esc, and a “more efficient” blade are currently in scope.
However, I feel the drivetrain alone is enough to win fights and I am excited to pit it against Emulsifier should we meet in the finals!
Now obviously if you’ve been following NHRL, you know the World Championships has already happened and that this post is playing catch-up. Stay tuned for the World Championships upgrade and event report!
