Friday evening Aaron and I drove down toe Norwalk, CT to meet teammate Liz for the NHRL competition held on April 20th. Much to my own surprise, I had three entries for this event: Silent X, Saiko!, and MegatRON. I was working on them up until the week of the competition and you can read about some of the preparations and tribulations that went into each robot here.
We got in bright and early to get all the robots through safety. In total, there was one Silent X, two Saiko!s, and two MegatRONs. NHRL events now consist of a qualifier round and a single-elimination bracket where you know or can predict your qualifier round fights. As a result, the spare robots were preconfigured for their opponents if known.


Due too the sheer number of robots I have here, I’ll summarize the experience for each robot and add detail where appropriate. Goals for each bot this event.
- Silent X – Test the hubmotor
- Saiko! – Qualify for championships
- MegatRON – Test treads, test hubmotor, qualify for championships
For Saiko! and MegatRON that means they need to reach the semi-finals round of the single-elimination tournament. For Silent X I am looking for opponents to stress test the hubmotor which means dishing out big hits and taking out-of-plane impacts from vertical spinners.
Silent X
X ascended to the tournament rounds with an overall record of 2-1 with wins against “Choose Kindness” and “Flycut” and an exit to “Impakt”.


“Choose Kindness” was a new build based around a fingertech beater bar and frost kit chassis. The driver, Lulu, was a student competing for her first time! Although X took the win, I was impressed with her driving skill (credited to practicing with her cat) and positive attitude. Keep an eye on this one, she’s going places!
The hubmotor performed well but had some gouges on the TPU nose that needed fixing. A detriment of the bar vs disk geometry is opponents can get close enough to hit the chassis.


I was incredibly excited for the Impakt fight. Lars is a fantastic builder and Impakt has an amazingly powerful weapon for a 3.something lb robot (4 lbs entry total because of his multibot weight bonus). This fight would be the ultimate test for the hubmotor and I was determined to test it to destruction. Lars was equally excited for this fight as well.
As we were loading in, it was evident that one of Impakt’s drive sides was not working and their team was deciding what do. Lars decided to continue the fight with one drive side down but I could tell he was disappointed going in to this at anything less than 100%.
In that moment I decided that my testing was more important that winning and chose a drive strategy that was a win-win for both of us: driving directly up his wedge and directly into his weapon. I knew this would ultimately lead to X’s defeat but I would get my testing nonetheless.


See the full overhead cam fight here. 6 or 7 hits later an uppercut in the inverted position cracked the connection between the stator and the base which dislodged the motor assembly. X landed wheels propped up by the motor and I tapped out.



Beyond stator twisting, that is the anticipated failure point for the assembly. It is the highest stress location especially considering the internal pockets for wires to pass around the stator. It is also the sole retaining feature for the assembly in this direction of the force.
Smiles all around at the end. I wasn’t able to retrieve the part for him by the end of the event but Lars has a cool trophy waiting for him the next event we cross paths!
MegatRON
MegatRON went 3-1, making it to the semi-finals and qualifying for the 2024 world championships.



Against Vacatank and Smack-o-lantern, I was able to test the hubmotor. I started with lighter hits, increasing severity as the match progressed but still avoiding hitting solid targets like Vacatank’s thresher bar. Various times where my opponents were stuck, I took the time to get familiar with the treads on the dusty wooden floor. Some moments, the drive felt drifty but overall a massive improvement over the wheels.
Some drawbacks of the hubmotor were due in part to my conservative esc settings. With so much less friction in the system, most if not all the braking would be the responsibility of the esc. I had set acceleration low intentionally to minimize heat build up; this meant that spinup was overall longer spindown commands would take longer too which resulted in some fun gyroscopic behavior.


MegatRON would actually fight Chonkiv twice. The first time in the qualifiers, Chonkiv caught on fire from the onset, forcing a tapout. The second time was the semi-finals for the event and this time Chonkiv was fully operational.
In its overhead defense configuration, Chonkiv added a minibot to allow it an armor section over the friction drive ring. That brought the spinning mass to nearly 25lbs and overall entry weight to nearly 50 lbs! With their new cleated feet, I already had concerns about moving them and would need to use their shell momentum to pop them onto my wedge.
I had previously fought and won against chonkiii at a previous NHRL using the same tactic, but that was with a different wedge. For this event, I equipped a older wedge which was shorter in height and had shorter swept wings. I allocated the weight to mid-upper guards since last time that is where chonkiii managed to hit after riding up the wedge. The shorter wings ended up being a detriment; Chonkiv was able to grab an edge early on and tear one of the mounts out. With a weakened mounting, the wedge soon came off entirely.

After losing the wedge, the odds were not in my favor to win directly. But since I knew I would be rebuilding MegatRON, I decided to continue fighting. MegatRON could still win on the off chance Chonkiv suffers an random internal failure or gets stuck on debris. Plus, I have a second MegatRON for the finals.



Despite all the destruction, I managed to push Chonkiv to a judges decision. I took significant structural damage and lost both treads but they lost one drive side and disabled their minibot (which counts for 50% of their entry). But we cant ignore aggression which favors an active weapon. Unsurprisingly, Chonkiv wins!

Oh did I mention Chonkiv was brought to NHRL by the Georgia Tech Robojackets? I was super stoked to see the club doing well and increasing involvement in combat robotics.
Saiko!
Saiko had the toughest day out of my three robots. Overall it went 5-2 for 2nd place with losses to “Gotham” and “Amphisbaena”. But beneath the veil of success was constant troubleshooting and uneasiness.






Before departing for the event, both Saiko! units were tested and verified to perform adequately. But during safety checks at NHRL, I started noting odd behavior. The first was desynchronization on the drive controllers. Most small robots run sensorless brushless controllers which depend on back emf from small rotor movements to properly sequence the hex FET bridge for startup.
This is one of those rare cases where having extra backlash in your gearing helps you. A higher gear ratio also helps by requiring less effort from the motor to rotate. Unfortunately for me, I was running a lower gear ratio. The interim fix was to set expo rates to 25%, maximize the acceleration ramp time on BLHeli32, and just drive very carefully. The ramifications from this issue are huge; if I command full forward but only one drive side activates, the robot turns instead and opens its side or back to the opponent.

During fights, more issues arose. In its very first fight vs Gotham, Saiko 1 popped its weapon esc on first spinup and died prior to the first hit. At the time, this was a total mystery; this motor and esc combination was used in the past so the prevailing theory was increased current draw due to the higher voltage. For the remainder of the event, Saiko! 2’s weapon was driven with a slow manual ramp up.
In tail end of the Baby Grim (fight 3) fight, I noticed the weapon speed decreasing for the same throttle command. Since these controllers are duty cycle controlled, it meant there was significant voltage drop and I was about to hit my voltage protection minimum. When this happens, the weapon will cease to respond as a protection for the battery and I’ll be judged as if I had taken damage.
This symptom surfaced in the Void match (fight 5) as well and drove the point and pressure to end fights early like with Blue Cheese (fight 4) and BattleTots match (fight 6). Based on match data, I suspected I had about 2 mins and 40 seconds of runtime with the weapon throttle at 50% max. Anything higher would of course decrease that runtime.

Amazing recoil from this hit vs Blue Cheese. He was spinning downwards because he was inverted. Saiko! flipped over but Blue Cheese’s beater was broken in half!
Somehow, Saiko! crawled its way to the finals to fight the dual beater bars of Amphisbaena who has had an amazing run today including its de-weaponing of Maximizer.
With all the issues Saiko! had been having all day, it was difficult to feel confident. Furthermore Amphisbaena had a minibot partner which meant its main robot could be up to 13.2 lbs (15lb total entry weight) compared to Saiko’s 11.4. The longer and taller forks on their front would likely deflect my dulled beater teeth if I went head-on as well.
It was an incredible back-and-forth fight to start with neither robot having a clear advantage until one fateful charge into the corner… Amphisbaena flipped over the top of Saiko! and hit the rear right corner, pulling a wheel and axles out of the frame. Due to the chain routing, losing one wheel completely meant that the entire drive side was inoperable.

After that, there was a situation where both robots were stuck on different things. Amphis’s minibot was wedged under Saiko! (and did not have the drive power to release the pin) and Amphis had backed onto Saiko!’s removed wheel. The match was paused to release the pin but not to free Amphisbaena since it had high-centered itself. It is important to note that for the semi-finals and onward, there would be no housebot assists since it was disabled. Given Saiko!’s short lifespan, I was going to take the KO if a countout started and finished.
But Amphisbaena was able to free itself before a countout could be completed and the match resumed. Shortly after, Saiko! ran out of battery and was counted out.

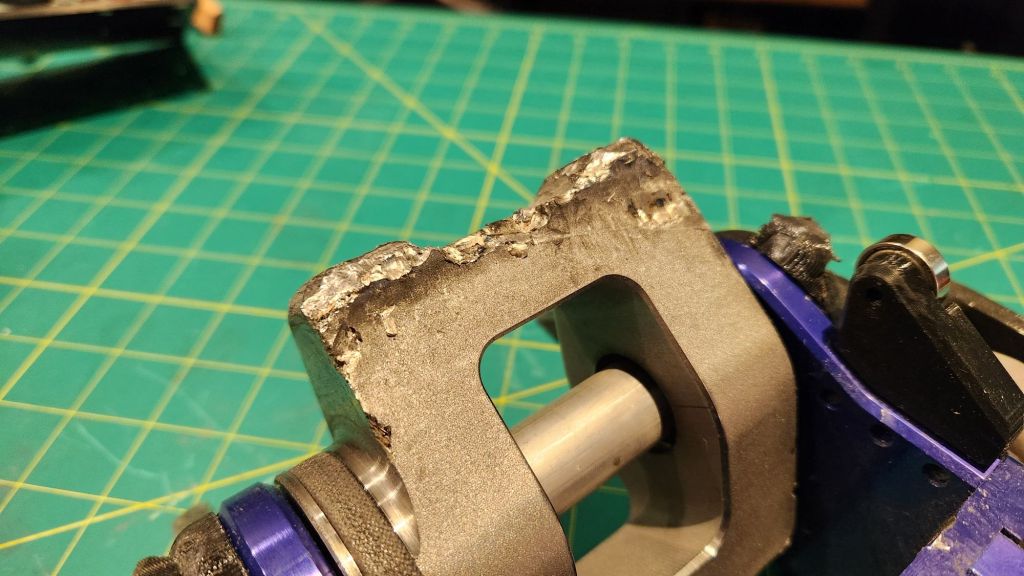
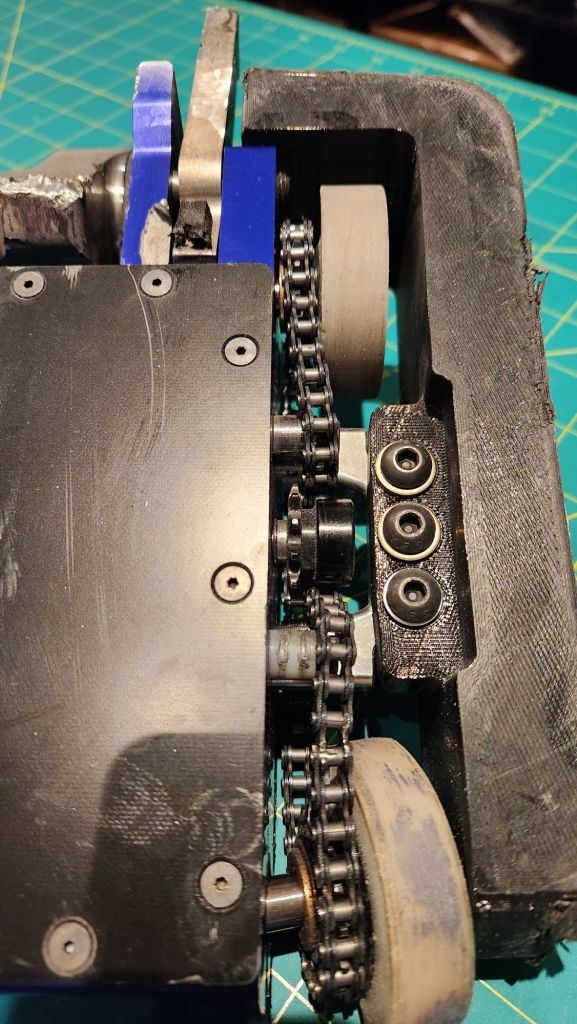

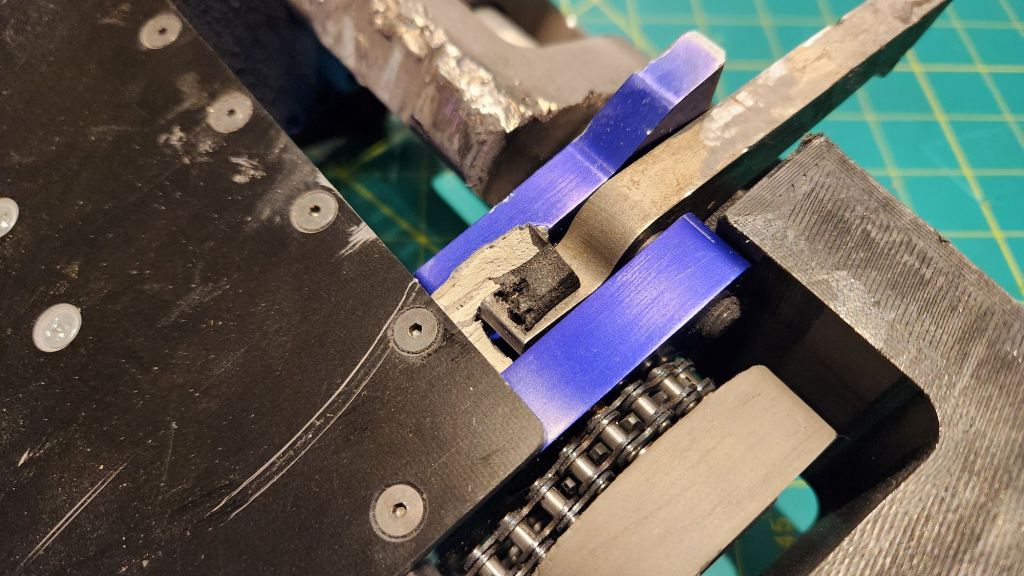

Some very impressive damage from that match. I was surprised that the rear wheels had pulled the axles out. The wheels are designed such that when hit, the tread will ablate but leave the sprocket portion in tact. I have two versions of Saiko! wheels, one made from with an aluminum core and other with a nylon core. I’ll be standardizing on nylon from here on out and perhaps experimenting with TPU.

Alex also has some nice trophy parts waiting for him next event!
Conclusions

The journey was a complete success in my book. Keeping our focus on the objectives for the event, I was able to:
- Test both hubmotor designs in delivering impacts
- Test the beetle hubmotor to failure and examine weak points
- Demonstrate the performance gains and success of implementation of the treaded drive
- Verify the stator pinning method worked on the hubmotor
- Qualify with Saiko!
- Qualify with MegatRON
There would be significant work on Saiko!, mostly in the electrical reliability. Some quick areas to address include:
- Investigate current limiting controllers like AM32
- Convert all geartrains to the higher 27:1 ratio
- Perform watt meter testing to estimate current draw and Ah usage. use data to inform Wh and overall capacity requirement.
- Investigate other areas of lossy behavior or inefficiencies.
Especially since Saiko! will be joining the NHRL June 1st teams event with a collection of all-stars. I can’t let the Dream Team down!
